是为自动控制、机械电子、电气工程等专业的基础控制课程而设计的教学实验设备,因具有开环不稳定的特性,需要设计控制器才能控制小球的位置,可满足自动控制原理、现代控制工程等课程的实验要求,也可以作为
电机学、电机与拖动、模式识别等课程的实验设备。
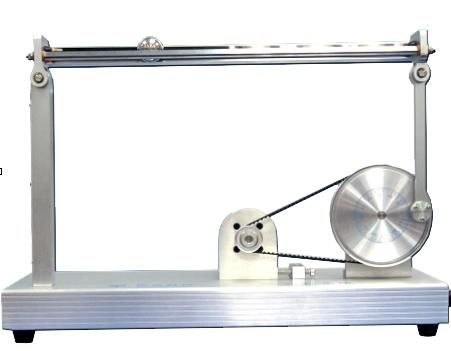
球杆系统分为执行系统和控制系统两大组成部分。
执行系统是一个典型的四连杆机构,横杆由一根带刻度的
不锈钢杆和一根直线位移
传感器组成,可以绕其左边的支点旋转,通过控制横杆的角度,就可以控制小球的在横杆上的位置。执行系统采用直流
伺服电机驱动,通过控制电机轴的转角,就可以实现对横杆角度的控制。控制系统采用智能伺服运动控制器,它是基于*新DSP 控制器技术的24-36V,3A全数字智能伺服驱动单元,可以控制直流无刷、有刷或永磁同步交流电机。通过直线
位移传感器采集小球的位置,控制器根据位置误差计算控制量,控制电机轴的转角,从而控制横杆的角度,使小球稳定到目标位置。
球杆系统实验软件采用嵌入式实时控制系统和MATLAB实时控制系统,嵌入式数字控制系统采用IPM Motion Studio图形化显示界面。MATLAB实时控制系统采用Simulink进行实时控制,方便用户进行各项基础实验以及算法开发。
系统特点
1.外形美观大方,开放式的机械和电气结构。
2.系统运行简单、易于操作、使用安全。
3.可以满足本科教学实验,课程设计,毕业设计以及算法研究等要求。
4.主要零部件采用工业常用零部件,系统运行可靠,使用寿命长。
主要技术指标
有效控制行程: 400mm
小球直径: 30mm
控制精度:+1mm或-1mm
电机额定功率:35W
同步带减速比:4
电源 :AC220V 50HZ 1A(可配AC110V)
重量 <10Kg
长×宽×高: 600mm×300mm×400mm
模拟量控制系统:
该模拟量控制系统采用典型的运算
放大器和驱动芯片以及信号发生电路,可以搭建典型的信号跟随电路,PID控制电路,完成模拟量控制实验。
主要实验内容:
4.信号跟随与滤波处理。
5.典型环节的阶跃响应实验。
6.模拟P,PD,PID控制器实验。
数字控制参考实验内容
1.系统建模,采用牛顿力学等方法对系统进行建模分析。
2.系统的开环响应特性分析。
3.PID控制器设计。
4.根轨迹控制器设计。
5.频率响应控制器设计。
6.用户自定义控制算法。